Design
Fully Autonomous Passenger Delivery From Scratch in 6 Weeks.
The 2016 Engineering Physics Robot Competition was a 6-week intensive 5-credit course run in the summer of 2016. The competition was focused on building self-driving autonomous cars to pick up passengers, uber style, and deliver them to a drop off location. Teams had to rely on internal mapping, intersection detection and wayfinding, collision avoidance strategies and IR beacon detection to navigate the course and deliver passengers safely to their destination.
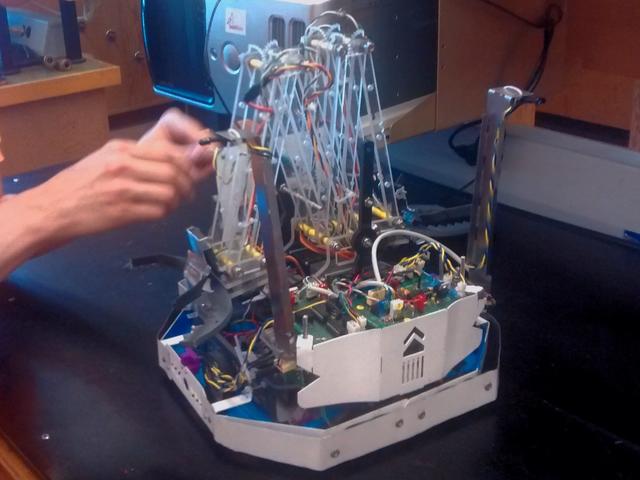
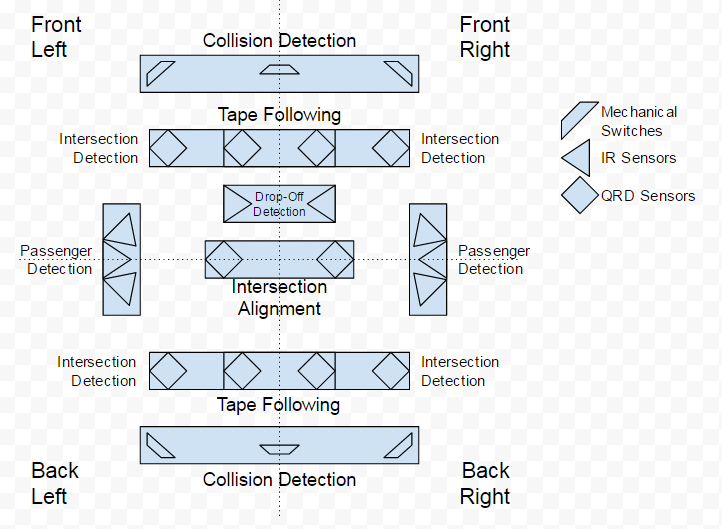
BI-DIRECTIONAL, BI-FUNCTIONAL, BY DESIGN
Built from polycarbonate, sheet metal, aluminum, and blood sweat and tears, this robot was designed to have bilateral symmetry to drive forwards or backwards. Every mechanical component except the motors, nuts and bolts was designed in SolidWorks and CNC machined.
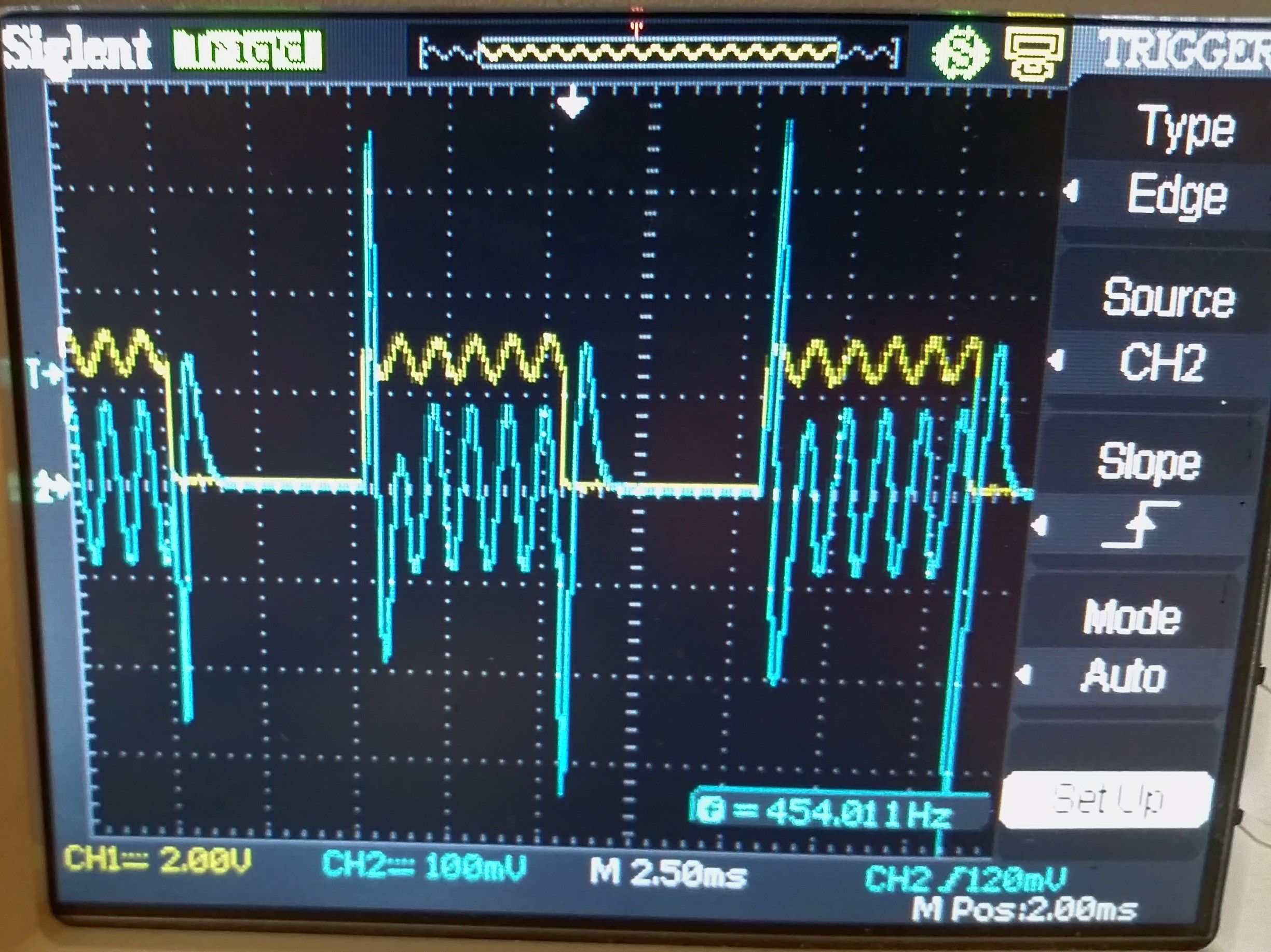
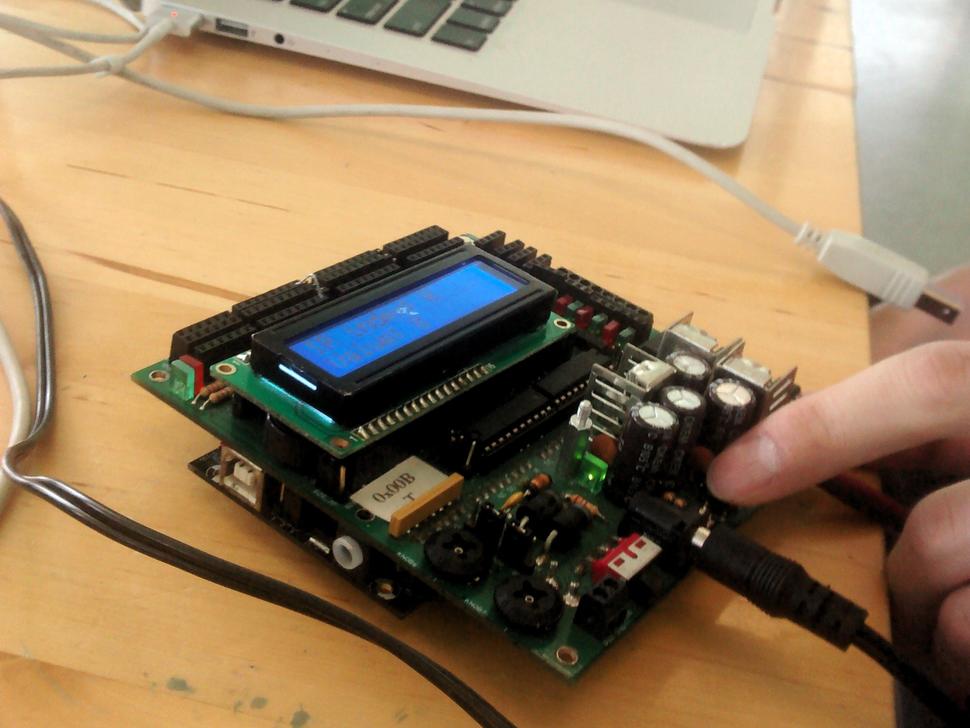
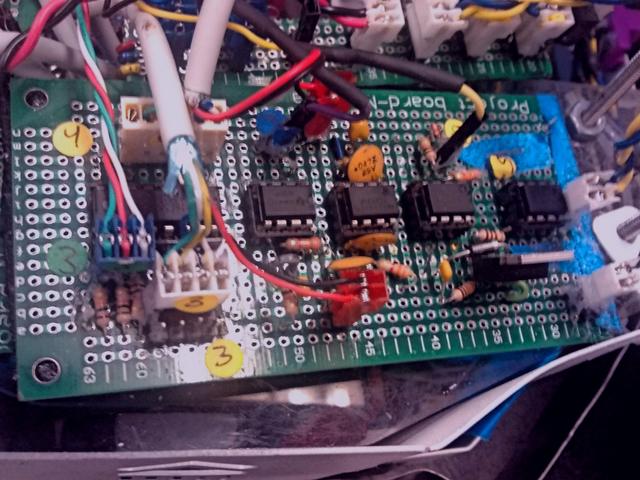
INTEGRATED ELECTRONIC SYSTEMS
Two multiplexing circuits receive signals from 6 IR-beacon sensors in addition to 10 QRD tape-following sensors. IR signals are filtered post-multiplexer by a sample and hold circuit, giving a 3ms respond time per sensor. This lets us check each IR sensor 5 times a second durinng contest play.
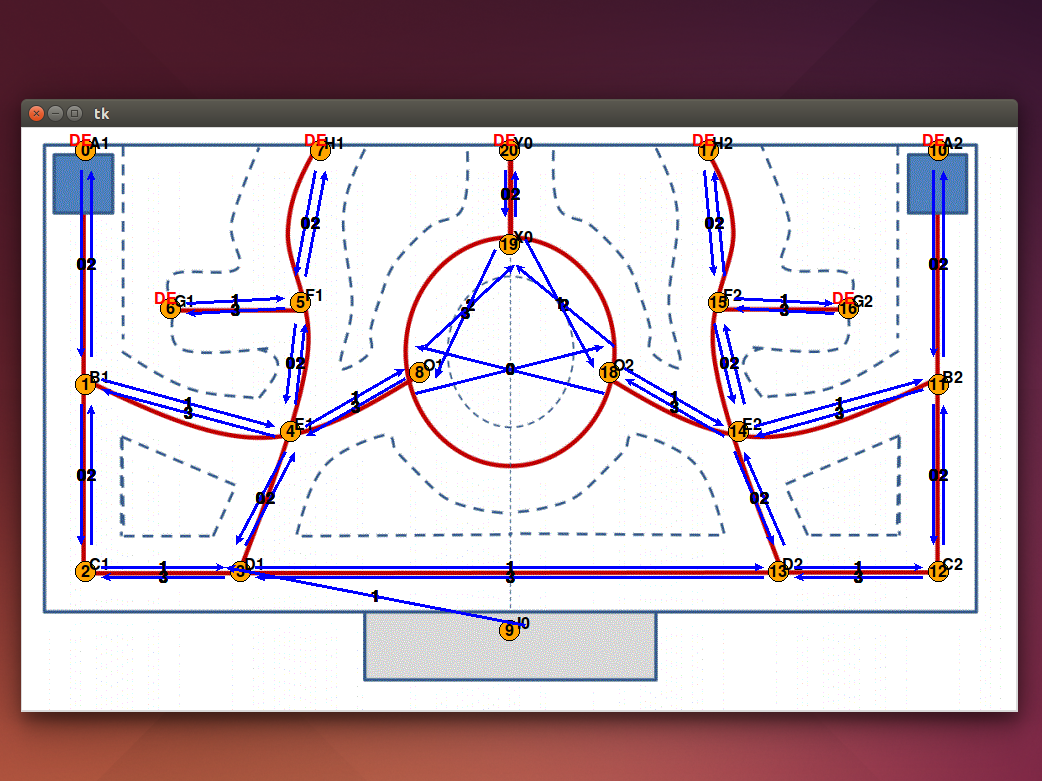
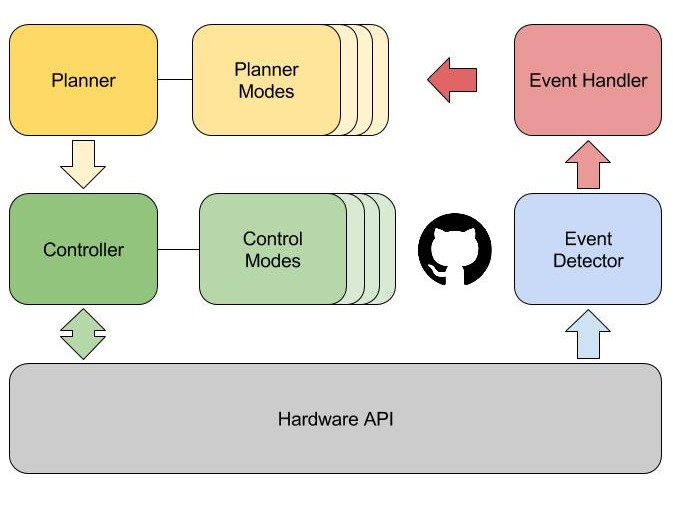
EVENT DETECTION DRIVEN ROBOT BEHAVIOR WITH PATH PLANNING
The Fighting Squid has several control modes it enters depending on environmental cues - a passenger pickup, drop-off, collision, etc. In the background, the Squid plans the shortest route between two nodes and updates this route as events unfold (collisions, pickups etc).