Sensor Layout
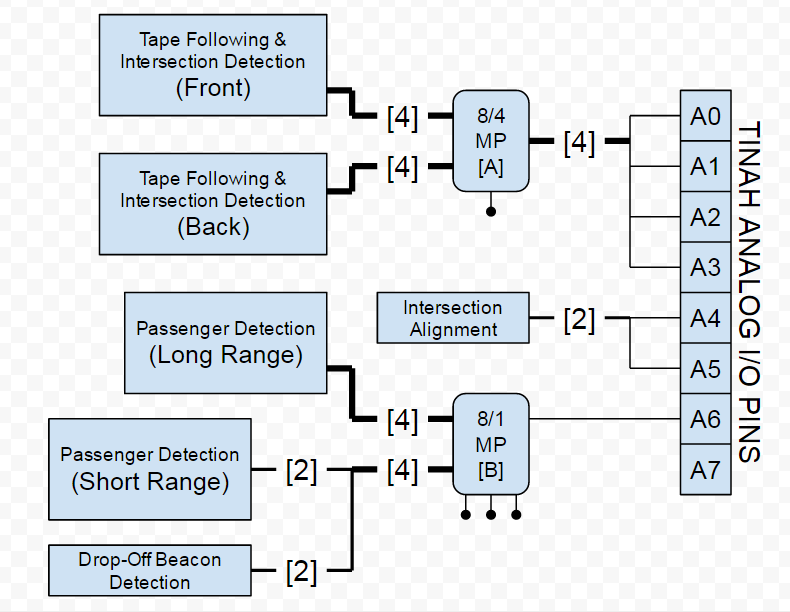
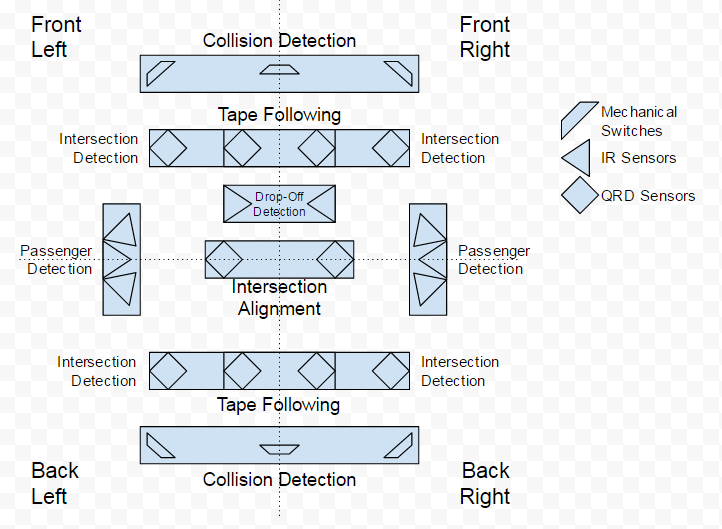
We designed a functionally symmetrical sensor layout, which allows our robot to be fully aware of its surroundings, in both directions. The QRD sensors, used to determine the position of the tape on the course, allow our robot to drive down the roads, as well as detect and navigate through intersections. The passenger IR sensors enable our robot to both detection passengers from a distance, and to accurately align to them for pickup. Our robot knows when it is next to the drop-off zone through the use of elevated IR sensors. Mechanical switches allow our robot to back off from collisions with other robots.